Getting Started with Scenic¶
Installation¶
Scenic requires Python 3.6 or newer. You can install Scenic from PyPI by simply running:
pip install scenic
Alternatively, you can download or clone the Scenic repository, which contains examples we’ll use below. Install Poetry, activate the virtual environment in which you would like to run Scenic, and then run:
poetry install
If you will be developing Scenic, add the -E dev option when invoking Poetry.
Note
If you are not already using a virtual environment, poetry install will create one.
You can then run poetry shell to create a terminal inside the environment for running
the commands below.
Either of the options above should install all of the dependencies which are required to run Scenic.
Scenarios using the scenic.simulators.webots.guideways model also require the pyproj package, and will prompt you if you don’t have it.
Note
For Windows, we recommend using bashonwindows (the Windows subsystem for Linux) on Windows 10. Instructions for installing poetry on bashonwindows can be found here.
In the past, the shapely package did not install properly on Windows.
If you encounter this issue, try installing it manually following the instructions here.
Note
You may also want to install the Polygon3 package (pip install Polygon3) to get
faster and more robust polygon triangulation. However, this package is based on the
GPC library, which is only free for non-commercial use.
Trying Some Examples¶
The Scenic repository contains many example scenarios, found in the examples directory.
They are organized by the simulator they are written for, e.g. GTA or Webots.
Each simulator has a specialized Scenic interface which requires additional setup (see Supported Simulators); however, for convenience Scenic provides an easy way to visualize scenarios without running a simulator.
Simply run the scenic module as a script, giving a path to a Scenic file:
python -m scenic examples/gta/badlyParkedCar2.scenic
This will compile the Scenic program and sample from it, displaying a schematic of the resulting scene. Since this is the badly-parked car example from our GTA case study, you should get something like this:
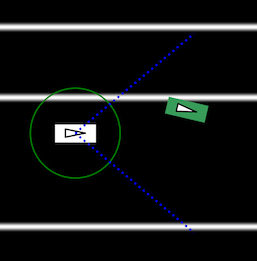
Here the circled rectangle is the ego car; its view cone extends to the right, where we see another car parked rather poorly at the side of the road (the white lines are curbs). If you close the window, Scenic will sample another scene from the same scenario and display it. This will repeat until you kill the generator (Control-c in Linux; right-clicking on the Dock icon and selecting Quit on OS X).
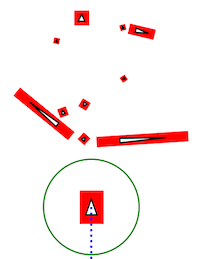
Scenarios for the other simulators can be viewed in the same way. Here are a few for Webots:
python -m scenic examples/webots/mars/narrowGoal.scenic
python -m scenic examples/webots/road/crossing.scenic
python -m scenic examples/webots/guideways/uberCrash.scenic


Learning More¶
Depending on what you’d like to do with Scenic, different parts of the documentation may be helpful:
If you want to learn how to write Scenic programs, see the tutorial.
If you want to use Scenic with a simulator, see the Supported Simulators page (which also describes how to interface Scenic to a new simulator, if the one you want isn’t listed).
If you want to add a feature to the language or otherwise need to understand Scenic’s inner workings, see our page on Scenic Internals.