Operators Reference
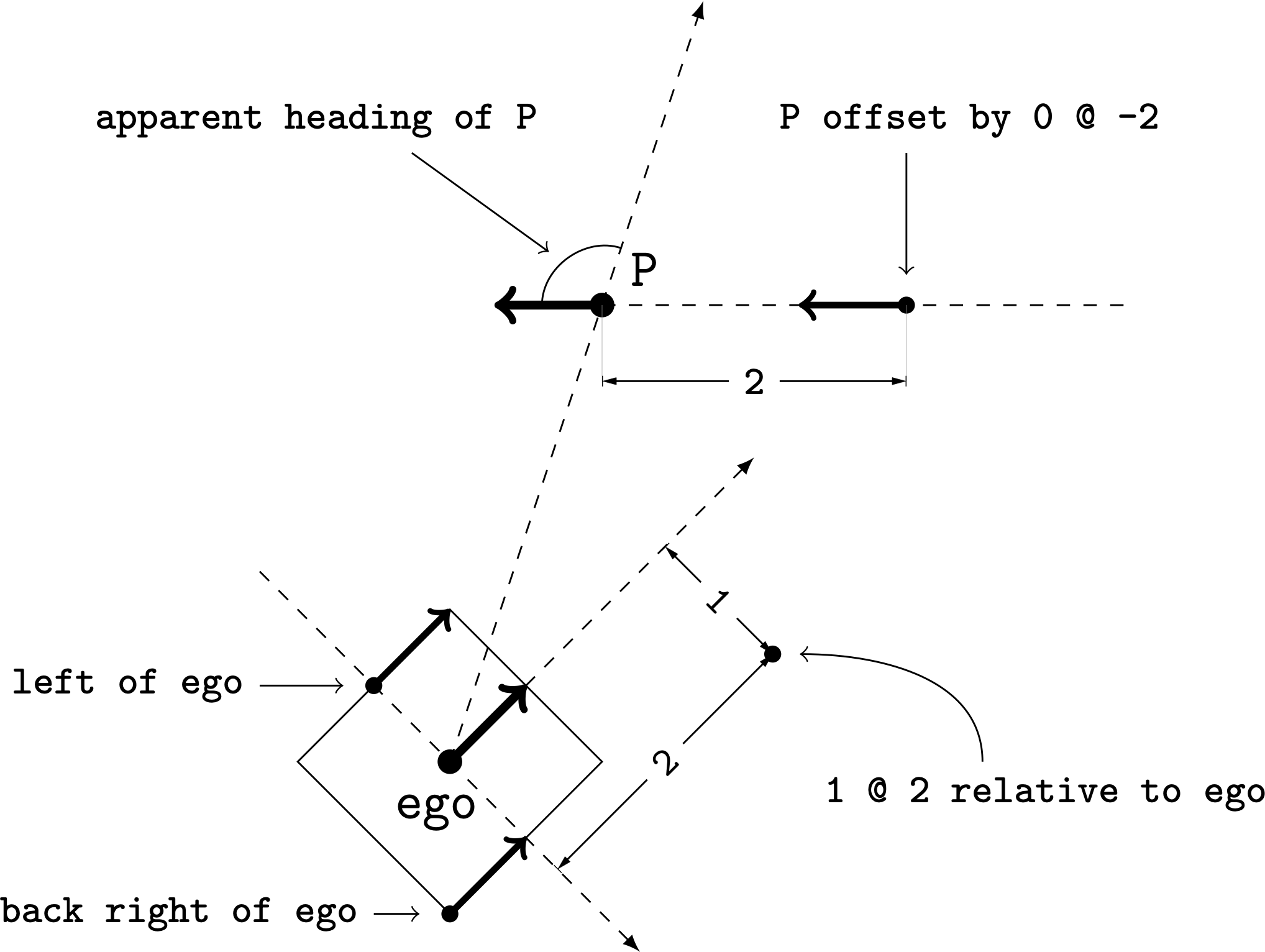
Illustration of several operators.
Each OrientedPoint (e.g. P) is shown as a bold arrow.
Scalar Operators
relative heading of heading [from heading]
The relative heading of the given heading with respect to ego (or the heading provided with the optional from heading)
apparent heading of OrientedPoint [from vector]
The apparent heading of the OrientedPoint, with respect to the line of sight from ego (or the position provided with the optional from vector)
distance [from vector] to vector
The distance to the given position from ego (or the position provided with the optional from vector)
angle [from vector ] to vector
The heading (azimuth) to the given position from ego (or the position provided with the optional from vector). For example, if angle to taxi is zero, then taxi is due North of ego
altitude [from vector ] to vector
The altitude to the given position from ego (or the position provided with the optional from vector ). For example, if altitude to plane is π, then plane is directly above ego.
Boolean Operators
(Point | OrientedPoint) can see (vector | Object)
Whether or not a position or Object is visible from a Point or OrientedPoint, accounting for occlusion.
See the Visibility System reference for a discussion of the visibility model.
(vector | Object) in region
Whether a position or Object lies in the Region; for the latter, the object must be completely contained in the region.
(Object | region) intersects (Object | region)
Whether an Object/Region intersects another Object/Region, i.e. whether any portion of the occupied spaces intersect.
When working with 2D regions, it can be useful to check intersection with the footprint of a region, e.g. when checking whether a car intersects a given lane. In this case, one would write car intersects lane.footprint instead of car intersects lane. For more details, see footprint.
Orientation Operators
scalar deg
The given angle, interpreted as being in degrees. For example 90 deg evaluates to π/2
vectorField at vector
The orientation specified by the vector field at the given position
(heading | vectorField) relative to (heading | vectorField)
The first heading/vector field, interpreted as an offset relative to the second heading/vector field. For example, -5 deg relative to 90 deg is simply 85 degrees. If either direction is a vector field, then this operator yields an expression depending on the position property of the object being specified.
Vector Operators
vector (relative to | offset by) vector
The first vector, interpreted as an offset relative to the second vector (or vice versa).
For example, (5, 5, 5) relative to (100, 200, 300) is (105, 205, 305).
Note that this polymorphic operator has a specialized version for instances of OrientedPoint, defined below: so for example (-3, 0, 0) relative to taxi will not use the version of this operator for vectors (even though the Object taxi can be coerced to a vector).
vector offset along direction by vector
The second vector, interpreted in a local coordinate system centered at the first vector and oriented along the given direction (which, if a vector field, is evaluated at the first vector to obtain an orientation)
Region Operators
visible region
The part of the given region which is visible from the ego object (i.e. the intersection of the given region with the visible region of the ego).
not visible region
The part of the given region which is not visible from the ego object (as above, based on the ego’s visible region).
region visible from (Point | OrientedPoint)
The part of the given region visible from the given Point or OrientedPoint (like visible region but from an arbitrary Point/OrientedPoint).
region not visible from (Point | OrientedPoint)
The part of the given region not visible from the given Point or OrientedPoint (like not visible region but from an arbitrary Point/OrientedPoint).
OrientedPoint Operators
vector relative to OrientedPoint
The given vector, interpreted in the local coordinate system of the OrientedPoint. So for example (1, 2, 0) relative to ego is 1 meter to the right and 2 meters ahead of ego.
OrientedPoint offset by vector
Equivalent to vector relative to OrientedPoint above
(front | back | left | right | top | bottom) of Object
The midpoint of the corresponding side of the bounding box of the Object, inheriting the Object’s orientation.
(front | back) (left | right) of Object
The midpoint of the corresponding edge of the Object’s bounding box, inheriting the Object’s orientation.
(top | bottom) (front | back) (left | right) of Object
The corresponding corner of the Object’s bounding box, inheriting the Object’s orientation.
Temporal Operators
Temporal operators can be used inside require statements to constrain how a dynamic scenario evolves over time.
The semantics of these operators are taken from Linear Temporal Logic (specifically, we use RV-LTL [B10] to properly model the finite length of Scenic simulations).
always condition
Require the given condition to hold throughout the execution of the dynamic scenario.
eventually condition
Require the given condition to hold at some point during the execution of the dynamic scenario.
next condition
Require the given condition to hold at the next time step of the dynamic scenario.
For example, while require X requires that X hold at time step 0 (the start of the simulation), require next X requires that X hold at time step 1.
The requirement require always (X implies next X) says that for every time step \(N\), if X is true at that time step then it is also true at step \(N+1\); equivalently, if X ever becomes true, it must remain true for the rest of the simulation.
condition until condition
Require the second condition to hold at some point, and the first condition to hold at every time step before then (after which it is unconstrained).
Note that this is the so-called strong until, since it requires the second condition to eventually become true.
For the weak until, which allows the second condition to never hold (in which case the first condition must always hold), you can write require (X until Y) or (always X and not Y).
hypothesis implies conclusion
Require the conclusion to hold if the hypothesis holds.
This is syntactic sugar for not hypothesis or conclusion.
It is mainly useful in making requirements that constrain multiple time steps easier to read: for example, require always X implies Y requires that at every time step when X holds, Y must also hold.
References