Dynamic Scenarios
The Scenic Fundamentals described how Scenic can model scenarios like “a badly-parked car” by defining spatial relationships between objects. Here, we’ll cover how to model temporal aspects of scenarios: for a scenario like “a badly-parked car, which pulls into the road as the ego car approaches”, we need to specify not only the initial position of the car but how it behaves over time.
Agents, Actions, and Behaviors
In Scenic, we call objects which take actions over time dynamic agents, or simply
agents. These are ordinary Scenic objects, so we can still use all of Scenic’s syntax
for describing their initial positions, orientations, etc. In addition, we specify their
dynamic behavior using a built-in property called behavior. Here’s an example using
one of the built-in behaviors from the Driving Domain:
model scenic.domains.driving.model
new Car with behavior FollowLaneBehavior
A behavior defines a sequence of actions for the agent to take, which need not be fixed
but can be probabilistic and depend on the state of the agent or other objects. In
Scenic, an action is an instantaneous operation executed by an agent, like
setting the steering angle of a car or turning on its headlights. Most actions are
specific to particular application domains, and so different sets of actions are provided
by different simulator interfaces. For example, the Driving Domain defines a
SetThrottleAction for cars.
To define a behavior, we write a function which runs over the course of the scenario,
periodically issuing actions. Scenic uses a discrete notion of time, so at each time
step the function specifies zero or more actions for the agent to take. For example, here
is a very simplified version of the FollowLaneBehavior above:
behavior FollowLaneBehavior():
while True:
throttle, steering = ... # compute controls
take SetThrottleAction(throttle), SetSteerAction(steering)
We intend this behavior to run for the entire scenario, so we use an infinite loop. In
each step of the loop, we compute appropriate throttle and steering controls, then use
the take statement to take the corresponding actions. When that statement is
executed, Scenic pauses the behavior until the next time step of the simulation, when the
function resumes and the loop repeats.
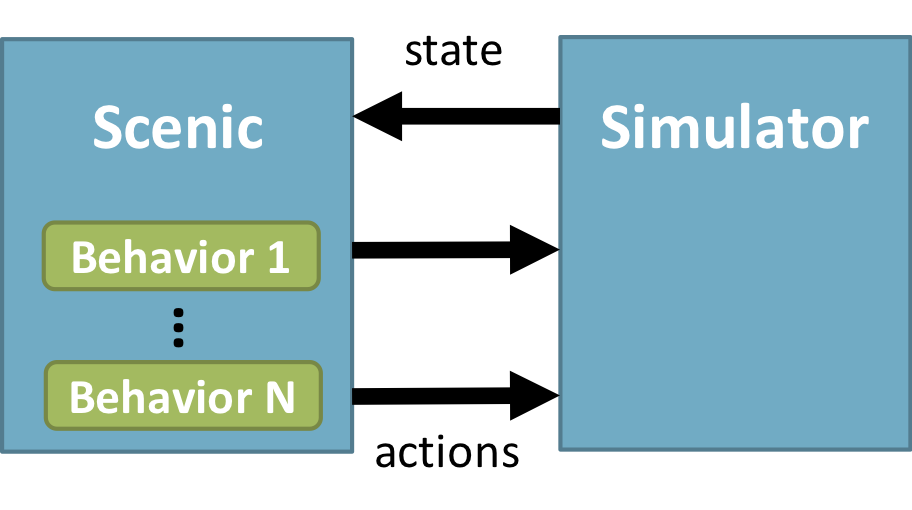
When there are multiple agents, all of their behaviors run in parallel; each time step, Scenic sends their selected actions to the simulator to be executed and advances the simulation by one step. It then reads back the state of the simulation, updating the positions and other dynamic properties of the objects.
Behaviors can access the current state of the world to decide what actions to take:
behavior WaitUntilClose(threshold=15):
while (distance from self to ego) > threshold:
wait
do FollowLaneBehavior()
Here, we repeatedly query the distance from the agent running the behavior (self)
to the ego car; as long as it is above a threshold, we wait, which means take no
actions. Once the threshold is met, we start driving by invoking the FollowLaneBehavior
we saw above using the do statement. Since FollowLaneBehavior runs forever, we will
never return to the WaitUntilClose behavior.
The example above also shows how behaviors may take arguments, like any Scenic function.
Here, threshold is an argument to the behavior which has default value 15 but can be
customized, so we could write for example:
ego = new Car
car2 = new Car visible, with behavior WaitUntilClose
car3 = new Car visible, with behavior WaitUntilClose(20)
Both car2 and car3 will use the WaitUntilClose behavior, but independent
copies of it with thresholds of 15 and 20 respectively.
Unlike ordinary Scenic code, control flow constructs such as if and while are
allowed to depend on random variables inside a behavior. Any distributions defined inside
a behavior are sampled at simulation time, not during scene sampling. Consider the
following behavior:
1behavior Foo():
2 threshold = Range(4, 7)
3 while True:
4 if self.distanceToClosest(Pedestrian) < threshold:
5 strength = TruncatedNormal(0.8, 0.02, 0.5, 1)
6 take SetBrakeAction(strength), SetThrottleAction(0)
7 else:
8 take SetThrottleAction(0.5), SetBrakeAction(0)
Here, the value of threshold is sampled only once, at the beginning of the scenario
when the behavior starts running. The value strength, on the other hand, is sampled
every time control reaches line 5, so that every time step when the car is braking we use
a slightly different braking strength (0.8 on average, but with Gaussian noise added with
standard deviation 0.02, truncating the possible values to between 0.5 and 1).
Interrupts
It is frequently useful to take an existing behavior and add a complication to it; for
example, suppose we want a car that follows a lane, stopping whenever it encounters an
obstacle. Scenic provides a concept of interrupts which allows us to reuse the basic
FollowLaneBehavior without having to modify it:
behavior FollowAvoidingObstacles():
try:
do FollowLaneBehavior()
interrupt when self.distanceToClosest(Object) < 5:
take SetBrakeAction(1)
This try-interrupt statement has similar syntax to the Python
try statement (and in fact allows except clauses just as in
Python), and begins in the same way: at first, the code block after the try: (the
body) is executed. At the start of every time step during its execution, the condition
from each interrupt clause is checked; if any are true, execution of the body is
suspended and we instead begin to execute the corresponding interrupt handler. In the
example above, there is only one interrupt, which fires when we come within 5 meters of
any object. When that happens, FollowLaneBehavior is paused and we instead apply full
braking for one time step. In the next step, we will resume FollowLaneBehavior wherever
it left off, unless we are still within 5 meters of an object, in which case the
interrupt will fire again.
If there are multiple interrupt clauses, successive clauses take precedence over
those which precede them. Furthermore, such higher-priority interrupts can fire even
during the execution of an earlier interrupt handler. This makes it easy to model a
hierarchy of behaviors with different priorities; for example, we could implement a car
which drives along a lane, passing slow cars and avoiding collisions, along the
following lines:
behavior Drive():
try:
do FollowLaneBehavior()
interrupt when self.distanceToNextObstacle() < 20:
do PassingBehavior()
interrupt when self.timeToCollision() < 5:
do CollisionAvoidance()
Here, the car begins by lane following, switching to passing if there is a car or other
obstacle too close ahead. During either of those two sub-behaviors, if the time to
collision gets too low, we switch to collision avoidance. Once the CollisionAvoidance
behavior completes, we will resume whichever behavior was interrupted earlier. If we were
in the middle of PassingBehavior, it will run to completion (possibly being
interrupted again) before we finally resume FollowLaneBehavior.
As this example illustrates, when an interrupt handler completes, by default we resume
execution of the interrupted code. If this is undesired, the abort statement can be
used to cause the entire try-interrupt statement to exit. For example, to run a behavior
until a condition is met without resuming it afterward, we can write:
behavior ApproachAndTurnLeft():
try:
do FollowLaneBehavior()
interrupt when (distance from self to intersection) < 10:
abort # cancel lane following
do WaitForTrafficLightBehavior()
do TurnLeftBehavior()
This is a common enough use case of interrupts that Scenic provides a shorthand notation:
behavior ApproachAndTurnLeft():
do FollowLaneBehavior() until (distance from self to intersection) < 10
do WaitForTrafficLightBehavior()
do TurnLeftBehavior()
Scenic also provides a shorthand for interrupting a behavior after a certain period of time:
behavior DriveForAWhile():
do FollowLaneBehavior() for 30 seconds
The alternative form do behavior for n steps uses time steps instead of real
simulation time.
Finally, note that when try-interrupt statements are nested, interrupts of the outer
statement take precedence. This makes it easy to build up complex behaviors in a modular
way. For example, the behavior Drive we wrote above is relatively complicated, using
interrupts to switch between several different sub-behaviors. We would like to be able to
put it in a library and reuse it in many different scenarios without modification.
Interrupts make this straightforward; for example, if for a particular scenario we want a
car that drives normally but suddenly brakes for 5 seconds when it reaches a certain
area, we can write:
behavior DriveWithSuddenBrake():
haveBraked = False
try:
do Drive()
interrupt when self in targetRegion and not haveBraked:
do StopBehavior() for 5 seconds
haveBraked = True
With this behavior, Drive operates as it did before, interrupts firing as appropriate
to switch between lane following, passing, and collision avoidance. But during any of
these sub-behaviors, if the car enters the targetRegion it will immediately brake for
5 seconds, then pick up where it left off.
Stateful Behaviors
As the last example shows, behaviors can use local variables to maintain state, which is
useful when implementing behaviors which depend on actions taken in the past. To
elaborate on that example, suppose we want a car which usually follows the Drive
behavior, but every 15-30 seconds stops for 5 seconds. We can implement this behavior as
follows:
behavior DriveWithRandomStops():
delay = Range(15, 30) seconds
last_stop = 0
try:
do Drive()
interrupt when simulation().currentTime - last_stop > delay:
do StopBehavior() for 5 seconds
delay = Range(15, 30) seconds
last_stop = simulation().currentTime
Here delay is the randomly-chosen amount of time to run Drive for,
and last_stop keeps track of the time when we last started to run it. When the time
elapsed since last_stop exceeds delay, we interrupt Drive and
stop for 5 seconds. Afterwards, we pick a new delay before the next stop, and save
the current time in last_stop, effectively resetting our timer to zero.
Note
It is possible to change global state from within a behavior by using the Python
global statement, for instance to communicate between
behaviors. If using this ability, keep in mind that the order in which behaviors of
different agents is executed within a single time step could affect your results. The
default order is the order in which the agents were defined, but it can be adjusted
by overriding the Simulation.scheduleForAgents method.
Requirements and Monitors
Just as you can declare spatial constraints on scenes using the require statement,
you can also impose constraints on dynamic scenarios. For example, if we don’t want to
generate any simulations where car1 and car2 are simultaneously visible from the
ego car, we could write:
require always not ((ego can see car1) and (ego can see car2))
Here, always condition is a temporal operator which can only be used inside a requirement, and which evaluates to true if and only if the condition is true at every time step of the scenario.
So if the condition above is ever false during a simulation, the requirement will be violated, causing Scenic to
reject that simulation and sample a new one. Similarly, we can require that a condition
hold at some time during the scenario using the eventually operator:
require eventually ego in intersection
It is also possible to relate conditions at different time steps.
For example, to require that car1 enters the intersection no later than when car2 does, we can use the until operator:
require car2 not in intersection until car1 in intersection
require eventually car2 in intersection
Temporal operators can be combined with Boolean operators to build up more complex requirements [1], e.g.:
require (always car.speed < 30) implies (always distance to car > 10)
See Temporal Operators for a complete list of the available operators and their semantics.
You can also use the ordinary require statement inside a behavior to require that a
given condition hold at a certain point during the execution of the behavior. For
example, here is a simple elaboration of the WaitUntilClose behavior we saw above which requires that no pedestrian comes close to self until the ego does (after which we place no further restrictions):
behavior WaitUntilClose(threshold=15):
while distance from self to ego > threshold:
require self.distanceToClosest(Pedestrian) > threshold
wait
do FollowLaneBehavior()
If you want to enforce a complex requirement that isn’t conveniently expressible either using the temporal operators built into Scenic or by modifying a behavior, you can define a monitor.
Like behaviors, monitors are functions which run in parallel
with the scenario, but they are not associated with any agent and any actions they take
are ignored (so you might as well only use the wait statement). Here is a monitor
for requiring that a given car spends at most a certain amount of time in the intersection:
1monitor LimitTimeInIntersection(car, limit=100):
2 stepsInIntersection = 0
3 while True:
4 require stepsInIntersection <= limit
5 if car in intersection:
6 stepsInIntersection += 1
7 wait
We use the variable stepsInIntersection to remember how many time steps car has spent in the intersection; if it ever exceeds the limit, the requirement on line 4 will fail and we will reject the simulation.
Note the necessity of the wait statement on line 7: if we omitted it, the
loop could run forever without any time actually passing in the simulation.
Like behaviors, monitors can take parameters, allowing a monitor defined in a library to
be reused in various situations. To instantiate a monitor in a scenario, use the
require monitor statement:
require monitor LimitTimeInIntersection(ego)
require monitor LimitTimeInIntersection(taxi, limit=200)
Preconditions and Invariants
Even general behaviors designed to be used in multiple scenarios may not operate
correctly from all possible starting states: for example, FollowLaneBehavior assumes
that the agent is actually in a lane rather than, say, on a sidewalk. To model such
assumptions, Scenic provides a notion of guards for behaviors. Most simply, we can
specify one or more preconditions:
behavior MergeInto(newLane):
precondition: self.lane is not newLane and self.road is newLane.road
...
Here, the precondition requires that whenever the MergeInto behavior is executed by
an agent, the agent must not already be in the destination lane but should be on the same
road. We can add any number of such preconditions; like ordinary requirements, violating
any precondition causes the simulation to be rejected.
Since behaviors can be interrupted, it is possible for a behavior to resume execution in a state it doesn’t expect: imagine a car which is lane following, but then swerves onto the shoulder to avoid an accident; naïvely resuming lane following, we find we are no longer in a lane. To catch such situations, Scenic allows us to define invariants which are checked at every time step during the execution of a behavior, not just when it begins running. These are written similarly to preconditions:
behavior FollowLaneBehavior():
invariant: self in road
...
While the default behavior for guard violations is to reject the simulation, in some
cases it may be possible to recover from a violation by taking some additional actions.
To enable this kind of design, Scenic signals guard violations by raising a
GuardViolation exception which can be caught like any other exception; the simulation
is only rejected if the exception propagates out to the top level. So to model the
lane-following-with-collision-avoidance behavior suggested above, we could write code
like this:
behavior Drive():
while True:
try:
do FollowLaneBehavior()
interrupt when self.distanceToClosest(Object) < 5:
do CollisionAvoidance()
except InvariantViolation: # FollowLaneBehavior has failed
do GetBackOntoRoad()
When any object comes within 5 meters, we suspend lane following and switch to collision
avoidance. When the CollisionAvoidance behavior completes, FollowLaneBehavior
will be resumed; if its invariant fails because we are no longer on the road, we catch
the resulting InvariantViolation exception and run a GetBackOntoRoad behavior to
restore the invariant. The whole try statement then completes, so the outermost loop
iterates and we begin lane following once again.
Terminating the Scenario
By default, scenarios run forever, unless the --time option is used to impose a
time limit. However, scenarios can also define termination criteria using the
terminate when statement; for example, we could decide to end a scenario as soon as
the ego car travels at least a certain distance:
start = new Point on road
ego = new Car at start
terminate when (distance to start) >= 50
Additionally, the terminate statement can be used inside behaviors and monitors: if
it is ever executed, the scenario ends. For example, we can use a monitor to terminate
the scenario once the ego spends 30 time steps in an intersection:
monitor StopAfterTimeInIntersection:
totalTime = 0
while totalTime < 30:
if ego in intersection:
totalTime += 1
wait
terminate
Note
In order to make sure that requirements are not violated, termination criteria are
only checked after all requirements. So if in the same time step a monitor uses the
terminate statement but another behavior uses require with a false condition,
the simulation will be rejected rather than terminated.
Trying Some Examples
You can see all of the above syntax in action by running some of our examples of dynamic
scenarios. We have examples written for the CARLA and LGSVL driving simulators, and those
in examples/driving in particular are designed to use Scenic’s abstract
driving domain and so work in either of these simulators, as well
as Scenic’s built-in Newtonian physics simulator. The Newtonian simulator is convenient
for testing and simple experiments; you can find details on how to install the more
realistic simulators in our Supported Simulators page (they should work on both Linux and
Windows, but not macOS, at the moment).
Let’s try running
examples/driving/badlyParkedCarPullingIn.scenic, which implements the “a
badly-parked car, which pulls into the road as the ego car approaches” scenario we
mentioned above. To start out, you can run it like any other Scenic scenario to get the
usual schematic diagram of the generated scenes:
$ scenic examples/driving/badlyParkedCarPullingIn.scenic --2d
To run dynamic simulations, add the --simulate option (-S for short).
Since this scenario is not written for a particular simulator, you’ll need to specify
which one you want by using the --model option (-m for short) to
select the corresponding Scenic world model: for example, to use the Newtonian simulator we could add
--model scenic.simulators.newtonian.driving_model. It’s also a good idea to put a time bound on
the simulations, which we can do using the --time option.
$ scenic examples/driving/badlyParkedCarPullingIn.scenic \
--2d \
--simulate \
--model scenic.simulators.newtonian.driving_model \
--time 200
Running the scenario in CARLA is exactly the same, except we use the
--model scenic.simulators.carla.model option instead (make sure to start CARLA
running first). For LGSVL, the one difference is that this scenario
specifies a map which LGSVL doesn’t have built in; fortunately, it’s easy to switch to a
different map. For scenarios using the driving domain, the map
file is specified by defining a global parameter map, and for the LGSVL interface we
use another parameter lgsvl_map to specify the name of the map in LGSVL (the CARLA
interface likewise uses a parameter carla_map). These parameters can be set at the
command line using the --param option (-p for short); for example,
let’s pick the “BorregasAve” LGSVL map, an OpenDRIVE file for which is included in the
Scenic repository. We can then run a simulation by starting LGSVL in “API Only” mode and
invoking Scenic as follows:
$ scenic examples/driving/badlyParkedCarPullingIn.scenic \
--2d \
--simulate \
--model scenic.simulators.lgsvl.model \
--time 200 \
--param map assets/maps/LGSVL/borregasave.xodr \
--param lgsvl_map BorregasAve
Try playing around with different example scenarios and different choices of maps (making
sure that you keep the map and lgsvl_map/carla_map parameters consistent).
For both CARLA and LGSVL, you don’t have to restart the simulator between scenarios: just
kill Scenic [2] and restart it with different arguments.
Further Reading
This tutorial illustrated most of Scenic’s core syntax for dynamic scenarios. As with the rest of Scenic’s syntax, these constructs are summarized in our Syntax Guide, with links to detailed documentation in the Language Reference. You may also be interested in some other sections of the documentation:
- Composing Scenarios
Building more complex scenarios out of simpler ones in a modular way.
- Supported Simulators
Details on which simulator interfaces support dynamic scenarios.
- Execution of Dynamic Scenarios
The gory details of exactly how behaviors run, monitors are checked, etc. (probably not worth reading unless you’re having a subtle timing issue).
Footnotes